import numpy as np
import math
import matplotlib.pyplot as plt
from matplotlib import animation
from IPython.display import HTML, display
import os
fmt = os.getenv("QUARTO_FORMAT")
plt.rcParams.update({
"text.usetex": True,
"text.latex.preamble": r"\usepackage{amsmath}\usepackage{xcolor}"
})
# ------------------------
# Parameters
# ------------------------
r = 1.5
N0 = 0.2
n_steps = 5
# Animation parameters
n_curve1_frames = 20 # faster initial curve
n_curve2_frames = 20
wait_frames = 8
final_wait = 16
first_step_frames = 20 # slow first vertical+horizontal
remaining_frames = 60 # rest of cobweb
textPos_x = 0.42
textPos_y = 0.38
total_curve_frames = n_curve1_frames + n_curve2_frames + 4*wait_frames
total_frames = total_curve_frames + first_step_frames + remaining_frames + wait_frames
# Malthusian functionAnimation parameters
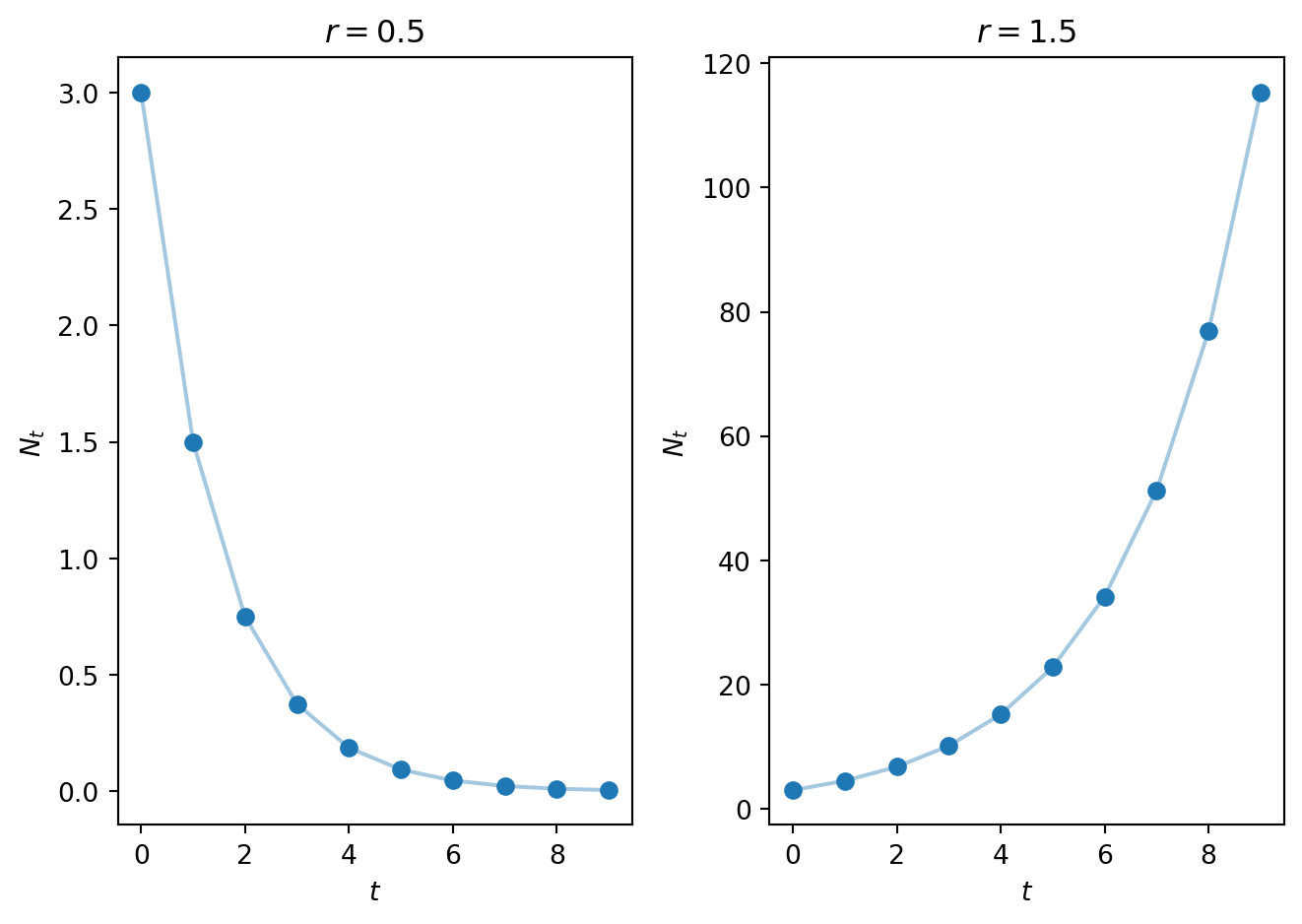
def f(x):
return r * x
# ------------------------
# Figure setup
# ------------------------
fig, (ax1, ax2) = plt.subplots(1, 2, figsize=(10, 4))
x_full = np.linspace(0, 1.2, 400)
curve_line, = ax1.plot([], [], label="$N_{t+1} = r N_t$")
diag_line, = ax1.plot([], [], '--', label="$N_{t+1} = N_t$")
cobweb_line, = ax1.plot([], [], color='purple', lw=1, label="Cobweb")
point, = ax1.plot([], [], 'ro', markersize=6)
ax1.set_xlim(0, 1.2)
ax1.set_ylim(0, 1.2)
ax1.set_xlabel("$N_t$")
ax1.set_ylabel("$N_{t+1}$")
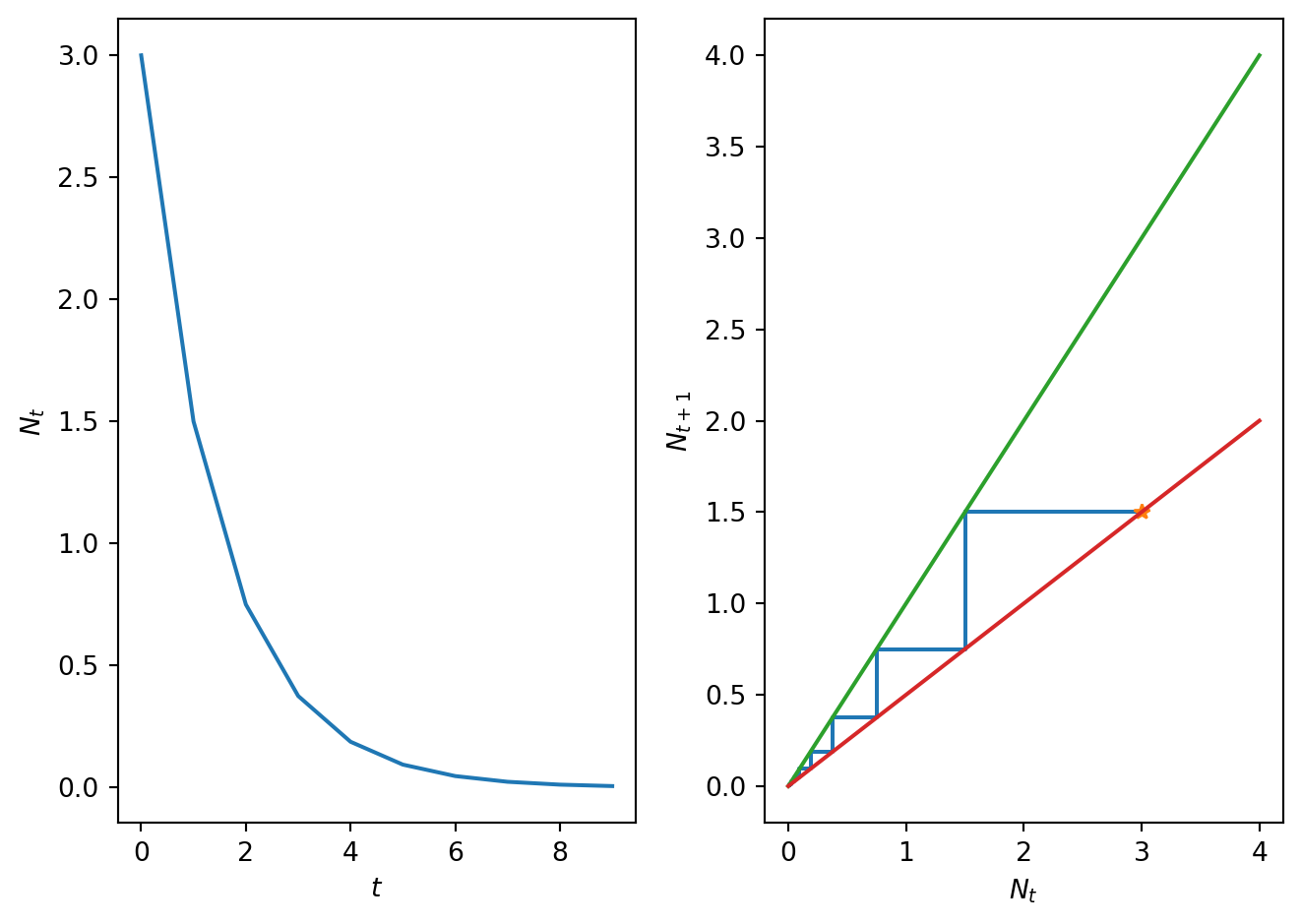
ax1.set_title("Cobweb diagram")
step_text1 = ax1.text(textPos_x, textPos_y, '', transform=ax1.transAxes,
va='top', fontsize=10)
step_text2 = ax1.text(textPos_x-0.15, textPos_y-0.145, '', transform=ax1.transAxes,
va='top', fontsize=9.5)
ax1.legend(loc='upper left')
time_line, = ax2.plot([], [], 'r-o', markersize=3)
ax2.set_xlim(0, n_steps)
ax2.set_ylim(0, 1.2)
ax2.set_xlabel("t")
ax2.set_ylabel("N")
ax2.set_title("Population vs time")
# ------------------------
# Precompute cobweb + time series
# ------------------------
y_next = f(N0)
xs, ys = [N0], [y_next]
time_vals = [0]
pop_vals = [N0]
x_current = N0
for n in range(1, n_steps):
xs.append(y_next)
ys.append(y_next)
x_current = y_next
time_vals.append(n)
pop_vals.append(y_next)
y_next = f(x_current)
xs.append(x_current)
ys.append(y_next)
# ------------------------
# Animation update function
# ------------------------
def update(frame):
# ---- Phase 1: Draw curves ----
if frame < n_curve1_frames: # N_t+1 = H(N_t)
cobweb_line.set_data([],[])
time_line.set_data([], [])
k = int(len(x_full) * frame / n_curve1_frames)
curve_line.set_data(x_full[:k], f(x_full[:k]))
diag_line.set_data([], [])
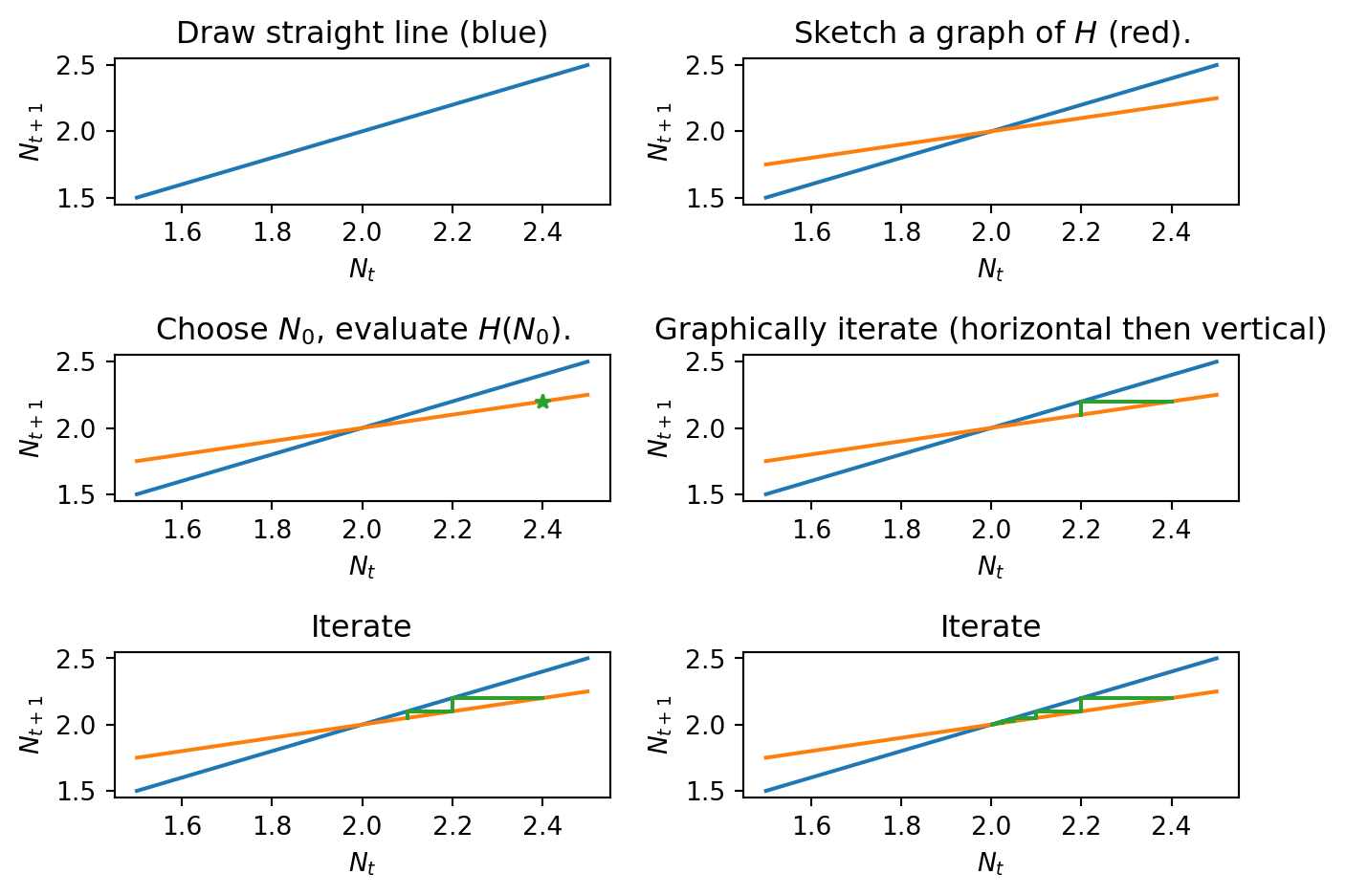
step_text1.set_text("Step 1: Draw $N_{t+1} = H(N_t)$")
return curve_line, diag_line, cobweb_line, time_line, point, step_text1
elif frame < n_curve1_frames + wait_frames: # pause
curve_line.set_data(x_full, f(x_full))
diag_line.set_data([], [])
step_text1.set_text("Step 1: Draw $N_{t+1} = H(N_t)$\n"
"Step 2: Draw $N_{t+1} = N_t$")
return curve_line, diag_line, cobweb_line, point, step_text1
elif frame < n_curve1_frames + n_curve2_frames + wait_frames: # N_t+1 = N_t
loc = frame - n_curve1_frames - wait_frames
k = int(len(x_full) * loc / n_curve2_frames)
curve_line.set_data(x_full, f(x_full))
diag_line.set_data(x_full[:k], x_full[:k])
step_text1.set_text("Step 1: Draw $N_{t+1} = H(N_t)$\n"
"Step 2: Draw $N_{t+1} = N_t$")
return curve_line, diag_line, cobweb_line, point, step_text1
elif frame < n_curve1_frames + n_curve2_frames + 2*wait_frames: # pause
curve_line.set_data(x_full, f(x_full))
diag_line.set_data(x_full, x_full)
step_text1.set_text("Step 1: Draw $N_{t+1} = H(N_t)$\n"
"Step 2: Draw $N_{t+1} = N_t$\n"
"Step 3: Mark $(N_0,H(N_0))$")
return curve_line, diag_line, cobweb_line, point, step_text1
elif frame < n_curve1_frames + n_curve2_frames + 3*wait_frames: # pause
curve_line.set_data(x_full, f(x_full))
diag_line.set_data(x_full, x_full)
step_text1.set_text("Step 1: Draw $N_{t+1} = H(N_t)$\n"
"Step 2: Draw $N_{t+1} = N_t$\n"
"Step 3: Mark $(N_0,H(N_0))$\n")
point.set_data([xs[0]], [ys[0]])
return curve_line, diag_line, cobweb_line, point, step_text1
elif frame < n_curve1_frames + n_curve2_frames + 4*wait_frames: # pause
curve_line.set_data(x_full, f(x_full))
diag_line.set_data(x_full, x_full)
step_text1.set_text("Step 1: Draw $N_{t+1} = H(N_t)$\n"
"Step 2: Draw $N_{t+1} = N_t$\n"
"Step 3: Mark $(N_0,H(N_0))$\n"
"Step 4: Horizonatal to red curve\n"
"${}_{{{}_{{\scriptscriptstyle \\cdot}}}} \\quad t=1 \\rightarrow (H(N_0),H(N_0))$\n")
point.set_data([xs[0]], [ys[0]])
return curve_line, diag_line, cobweb_line, point, step_text1
# ---- Phase 2: Cobweb ----
cobweb_frame = frame - total_curve_frames
total_segments = n_steps * 2 # 2 per iteration (vertical + horizontal)
time_progress = n_steps
# ---- First slow step ----
if cobweb_frame < first_step_frames:
progress = cobweb_frame / first_step_frames
if progress < 0.25: # horizontal
p = progress / 0.25
time_progress = p
x0, y0, x1, y1 = xs[0], ys[0], xs[1], ys[1]
x_dot, y_dot = x0 + p*(x1 - x0), y0 + p*(y1 - y0)
x_draw = [x0, x_dot]
y_draw = [y0, y_dot]
step_text1.set_text("Step 1: Draw $N_{t+1} = H(N_t)$\n"
"Step 2: Draw $N_{t+1} = N_t$\n"
"Step 3: Mark $(N_0,H(N_0))$\n"
"Step 4: Horizonatal to red curve\n"
"${}_{{{}_{{\scriptscriptstyle \\cdot}}}} \\quad t=1 \\rightarrow (H(N_0),H(N_0))$\n")
elif progress < 0.75: # pause
time_progress = 1.0
x0, y0, x1, y1 = xs[0], ys[0], xs[1], ys[1]
x_dot, y_dot = x1, y1
x_draw = [x0, x1]
y_draw = [y0, y1]
if progress > 0.3:
step_text1.set_text("Step 1: Draw $N_{t+1} = H(N_t)$\n"
"Step 2: Draw $N_{t+1} = N_t$\n"
"Step 3: Mark $(N_0,H(N_0))$\n"
"Step 4: Horizonatal to red curve\n"
"${}_{{{}_{{\scriptscriptstyle \\cdot}}}} \\quad t=1 \\rightarrow (H(N_0),H(N_0))$\n"
"Step 5: Vertical to blue curve\n"
"${}_{{{}_{{\scriptscriptstyle \\cdot}}}} \\quad t=1 \\rightarrow (N_1,H(N_1))$\n")
else: # vertical
time_progress = 1.0
p = (progress - 0.75)/0.25
x0, y0, x1, y1, x2, y2 = xs[0], ys[0], xs[1], ys[1], xs[2], ys[2]
x_dot, y_dot = x1 + p*(x2 - x1), y1 + p*(y2 - y1)
x_draw = [x0, x1, x_dot]
y_draw = [y0, y1, y_dot]
point.set_data([x_dot], [y_dot])
cobweb_line.set_data(x_draw, y_draw)
elif cobweb_frame < first_step_frames + wait_frames:
time_progress = 1.0
point.set_data([xs[2]], [ys[2]])
step_text1.set_text("Step 1: Draw $N_{t+1} = H(N_t)$\n"
"Step 2: Draw $N_{t+1} = N_t$\n"
"Step 3: Mark $(N_0,H(N_0))$\n"
"Step 4: Horizonatal to red curve\n"
"${}_{{{}_{{\scriptscriptstyle \\cdot}}}} \\quad t=n \\rightarrow (H(N_{n-1}),H(N_{n-1}))$\n"
"Step 5: Vertical to blue curve\n"
"${}_{{{}_{{\scriptscriptstyle \\cdot}}}} \\quad t=n \\rightarrow (N_n,H(N_n))$\n")
step_text2.set_text(r"$\text{Iterate}\left\{ \begin{array}{l} \\ \\ \\ \\ "
r" \end{array} \right.$")
elif cobweb_frame < first_step_frames + wait_frames + remaining_frames: # remaining frames
remaining_frame = cobweb_frame - first_step_frames - wait_frames
remaining_total_frames = remaining_frames
progress_remaining = remaining_frame / remaining_total_frames
segments_after_first = xs[2:] # skip first 2 points
ys_after_first = ys[2:]
n_points = int(progress_remaining * (len(segments_after_first)-1))
n_points = min(n_points, len(segments_after_first)-2)
x_prev, y_prev = segments_after_first[n_points], ys_after_first[n_points]
x_next, y_next = segments_after_first[n_points+1], ys_after_first[n_points+1]
interp = progress_remaining * (len(segments_after_first)-1) - n_points
x_dot = x_prev + interp*(x_next - x_prev)
y_dot = y_prev + interp*(y_next - y_prev)
x_draw = xs[:2] + segments_after_first[:n_points+1] + [x_dot]
y_draw = ys[:2] + ys_after_first[:n_points+1] + [y_dot]
point.set_data([x_dot], [y_dot])
cobweb_line.set_data(x_draw, y_draw)
if n_points%2 == 0:
time_progress_int = math.floor(1.0 + (n_steps-2.0)*progress_remaining)
time_progress_cont = 1.0 + (n_steps-2.0)*progress_remaining - time_progress_int
time_progress = time_progress_int + 2.0*time_progress_cont
else:
time_progress = math.floor(2 + n_points/2.0)
# ---- Time series ----
ti = int(math.floor(time_progress))
tp = time_progress - ti
t_draw = time_vals[:ti+1]
p_draw = pop_vals[:ti+1]
if ti+1 < len(time_vals):
t0, p0 = time_vals[ti], pop_vals[ti]
t1, p1 = time_vals[ti+1], pop_vals[ti+1]
t_draw = list(t_draw) + [t0 + tp*(t1-t0)]
p_draw = list(p_draw) + [p0 + tp*(p1-p0)]
time_line.set_data(t_draw, p_draw)
return curve_line, diag_line, cobweb_line, time_line, point, step_text2
# ------------------------
# Run animation
# ------------------------
ani = animation.FuncAnimation(
fig,
update,
frames=total_frames+final_wait,
interval=100,
blit=True
)
if fmt == "html" or fmt is None:
display(HTML(ani.to_html5_video()))
plt.close(fig)
else:
# ---- Render final frame for PDF ----
update(total_frames + final_wait - 1)
plt.show()